Two papers from the lab have been accepted for the ACM/IEEE International Conference on Human-Robot Interaction (HRI). Look for them in March!
- Reig, S., Carter, E. J., Fong, T., Forlizzi, J., & Steinfeld, A. Flailing, hailing, prevailing: Perceptions of multi-robot failure recovery strategies.
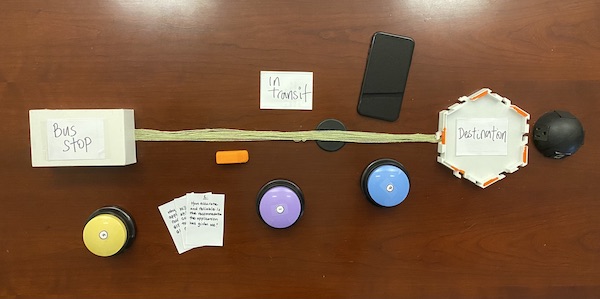
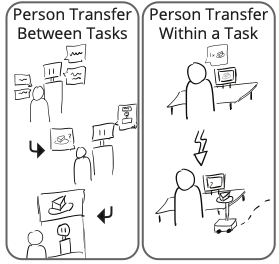
- Tan, X. Z., Luria, M., Forlizzi, J., & Steinfeld, A. Charting sequential person transfers between devices, agents, and robots.